
Evaluierung des INADEF-Prototyps anhand „historischer Ereignisse“
von BFW
Grundsätzlich sind vier verschiedene Ergebnisse der Vorhersage möglich (vgl. Abb.). Da die Prognose auf Tagesbasis erfolgt, dominieren die Prognosen kein Ereignis vorhergesagt und kein Ereignis beobachtet (npnon) stark. Dadurch kommt es zu einer hohen Anzahl zufällig richtiger Treffer, der mittels Cohen’s Kappa (Landis and Koch, 1977) eliminiert werden kann.

Die Analysen wurden für neun verschiedene Niederschlags-Input Szenarien für alle fünf Testgebiete durchgeführt die sich aus der Verschneidung der gewählten Niederschlagswerte mit dem Buffer und um das Einzugsgebiet ergeben. Beispiel: M1_max wäre der höchste INCA-Pixelwert aus dem Gebiet mit 1 km Buffer.

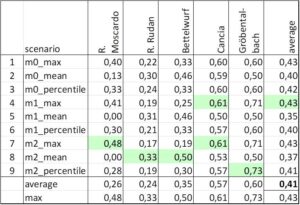
Es zeigen sich zwischen den Gebieten erhebliche Unterschiede, während die Wahl des Niederschlags-Szenariums außer im Rio Moscardo nur mäßigen Einfluss auf die Vorhersagequalität hat. Im Gröbentalbach und Cancia werden die besten Resultate erzielt. Ein ähnliches Bild ergaben die Analysen der (modifizierten) Trefferrate und der Eintrittswahrscheinlichkeit (Wahrscheinlichkeit bei Alarm, das kein Fehlalarm).
Die Analyse der Einzelereignisse ergab mit Ausnahme eines Ereignisses (Bettelwurfmure) eine durchwegs gute zeitliche Genauigkeit bei den korrekt vorhergesagten Ereignissen, jedoch mäßige (Gröbentalbach) bis sehr geringe Qualitäten bezüglich des Volumens. Die von INCA generierten Niederschlagsganglinien stimmen überwiegend relativ gut in ihrem Verlauf mit den Messwerten der Niederschlagsstationen überein, die Absolutwerte können weichen allerdings deutlich voneinander abweichen. Der Qualitätsverlust aufgrund steigender Prognosezeiträume konnte nicht analysiert werden, da die entsprechenden Datensätze nicht zu Verfügung standen.
Über alle Evaluierungen hinweg gesehen konnten mit dem INADEF-Prototyp im Gröbentalbach und Cancia auf Anhieb ansprechende Trefferraten erzielt werden, während es bei den anderen Gebieten – die Ursache liegt wahrscheinlich in unzureichend genauen Input-Daten – Nachkalibrierungen erforderlich sind.